
انقلاب حس لامسه در رباتیک ؛ از پوست طبیعی انسان تا پوست های الکترونیکی
لامسه یکی از بنیادیترین و در عین حال نادیدهگرفتهشدهترین حواس انسان است. این حس، پیش از آنکه انسان بتواند ببیند یا بشنود، امکان برقراری ارتباط مستقیم با جهان را برای موجودات زنده فراهم کرده است. لامسه نخستین زبان حیات است؛ زبانی که از طریق آن بدن میآموزد کجا ایمن است، کجا خطر وجود دارد و چگونه باید در محیط حرکت کند. اهمیت این حس بهقدری عمیق است که حذف یا اختلال در آن، نهتنها کیفیت زندگی بلکه خودِ بقا را تهدید میکند.
از منظر علمی، حس لامسه (Sense of Touch) به توانایی سیستم عصبی در شناسایی، انتقال و پردازش محرکهایی اطلاق میشود که بهصورت فیزیکی بر بدن اعمال میشوند. این محرکها میتوانند شامل تماس، فشار، کشش، لرزش، دما و درد باشند. برخلاف تصور عمومی، لامسه یک حس واحد و ساده نیست، بلکه مجموعهای از مسیرهای حسی موازی است که هر کدام اطلاعات متفاوتی را به مغز منتقل میکنند و در نهایت تجربهای پیچیده و چندلایه از «لمس» را شکل میدهند.
نکتهای که لامسه را از سایر حواس متمایز میکند، این است که بر پایه تماس مستقیم بنا شده است. در حالی که بینایی و شنوایی اطلاعات را از فاصله دریافت میکنند، لمس تنها زمانی فعال میشود که بدن بهطور واقعی با محیط درگیر شود. همین ویژگی باعث شده است که لامسه نقشی فعال و تعاملی در شناخت جهان داشته باشد؛ ما با لمسکردن، محیط را کشف میکنیم، نه صرفاً مشاهده یا شنود آن.
از دیدگاه زیستی، هیچ حسی به اندازه لامسه با بقا گره نخورده است. درد، گرما و فشار شدید بهعنوان بخشی از سیستم لمسی، نقش یک سامانه هشدار سریع را ایفا میکنند. زمانی که پوست با یک سطح داغ، تیز یا خطرناک تماس پیدا میکند، سیگنالهای عصبی پیش از آنکه آگاهی کامل شکل بگیرد، واکنشهای حفاظتی را فعال میکنند. عقبکشیدن دست از روی شعله، نمونهای کلاسیک از عملکرد این سیستم است؛ واکنشی که اغلب سریعتر از تصمیمگیری آگاهانه رخ میدهد و جان انسان را حفظ میکند.
لامسه تنها یک سیستم هشدار نیست، بلکه پایه کنترل حرکت و تعادل بدن نیز محسوب میشود. انسان بدون نگاهکردن میداند دستش کجاست، چهقدر باید به یک جسم نیرو وارد کند و چگونه روی زمین قدم بردارد. این توانایی ناشی از بخش عمقی حس لامسه است که به آن پروپریوسپشن گفته میشود. بدون این بازخورد حسی، حرکتهای دقیق، هماهنگی اندامها و حتی ایستادن ساده نیز مختل میشود.
یکی از تفاوتهای اساسی لامسه با حواس دیگر، پراکندگی گیرندههای آن در سراسر بدن است. برخلاف بینایی که به شبکیه چشم محدود میشود یا شنوایی که در حلزون گوش متمرکز است، گیرندههای لمسی در پوست، اطراف فولیکولهای مو، عضلات، تاندونها، مفاصل و حتی اندامهای داخلی پراکندهاند. به همین دلیل، سیگنالهای لمسی مسیر طولانیتری را طی میکنند و پردازش آنها نیازمند هماهنگی چندین سطح از سیستم عصبی است.
همین پراکندگی و تنوع گیرندهها باعث شده است که لامسه یکی از پیچیدهترین حواس انسان باشد. لمس تنها اطلاعاتی درباره «وجود تماس» نمیدهد، بلکه شدت، مدت، محل، نوع و حتی بار عاطفی تماس را منتقل میکند. یک لمس میتواند هشداردهنده و دردناک باشد، در حالی که لمس دیگری آرامشبخش، لذتبخش و اجتماعی تلقی شود. این چندبعدیبودن، لامسه را به پلی میان فیزیولوژی، روان و رفتار اجتماعی تبدیل کرده است.
از نظر عملکردی، تجربه لمسی انسان را میتوان در قالب دو جریان اصلی درک کرد. جریان اول، لمس محافظ است که سریع، هشداردهنده و نسبتاً غیر دقیق عمل میکند و وظیفه آن حفاظت از بدن در برابر آسیب است. جریان دوم، لمس تفکیکی یا تشخیصی است که اطلاعات بسیار دقیقتری درباره بافت، شکل و ویژگیهای سطح اشیا فراهم میکند. این جریان دوم، پایه مهارتهای ظریف دستی، نوشتن، کار با ابزار و تعامل پیچیده با محیط محسوب میشود.
اهمیت حیاتی لامسه زمانی بهوضوح آشکار میشود که این حس دچار اختلال باشد. در موارد نادر بیحسی مادرزادی به درد، افراد قادر به حسکردن درد یا دماهای شدید نیستند. این وضعیت، برخلاف تصور اولیه، یک مزیت محسوب نمیشود، بلکه خطرناک است؛ زیرا نبود بازخورد درد باعث میشود آسیبها دیر تشخیص داده شوند و صدمات جدیتری به بدن وارد شود. این مثال نشان میدهد که درد بخشی ضروری از سیستم ایمنی حسی بدن است، نه یک نقص.
با وجود چنین نقش بنیادینی، مطالعه تکامل حس لامسه نسبت به بینایی و شنوایی کمتر مورد توجه قرار گرفته است. یکی از دلایل اصلی این مسئله آن است که فسیلها عمدتاً بافتهای سخت را حفظ میکنند و سیستم عصبی محیطی و گیرندههای پوستی در فسیلها باقی نمیمانند. همچنین ردپاهای فسیلی اگرچه الگوی حرکت را نشان میدهند، اما اطلاعاتی درباره بازخورد حسی و تنظیم حرکتی ارائه نمیکنند. افزون بر این، ظرافت و میکروسکوپیبودن پایانههای عصبی لمسی، مطالعه آنها را حتی در جانوران زنده نیز دشوار میسازد.
در نهایت، میتوان گفت لامسه حسی است که جهان را برای انسان «واقعی» میکند. این حس مرز میان بدن و محیط را تعریف میکند، امکان تعامل مستقیم با جهان را فراهم میسازد و زیربنای بسیاری از تواناییهای حرکتی، شناختی و اجتماعی انسان است. انسان ممکن است بدون بینایی یا شنوایی زندگی کند، اما بدون لمس، نه بقا ممکن است و نه تجربه زیستهای که بتوان آن را «زندگی» نامید.
کشف مولکولی حس لامسه و دما؛ از درک تجربی لمس تا شناسایی کانالهای یونی حسی
برای دهههای طولانی، دانشمندان میدانستند که انسان میتواند گرما، سرما، فشار و درد را احساس کند، اما پاسخ به این پرسش بنیادین همچنان مبهم بود: بدن چگونه این محرکهای فیزیکی را در سطح مولکولی تشخیص میدهد؟ تا اواخر قرن بیستم، بیشتر دانستهها درباره حس لامسه و دما در سطح فیزیولوژیک یا رفتاری باقی مانده بود و سازوکار دقیق مولکولی که یک محرک خارجی را به سیگنال عصبی تبدیل میکند، ناشناخته بود. نقطه عطف این مسیر زمانی شکل گرفت که پژوهشگران به این نتیجه رسیدند که برای درک لمس، باید مستقیماً به سطح مولکولها و کانالهای یونی بازگردند.
درک مولکولی حس دما از یک مشاهده ساده اما هوشمندانه آغاز شد: چرا فلفل تند حس سوزش و گرما ایجاد میکند؟ این احساس در واقع ناشی از افزایش واقعی دما نیست، بلکه نتیجه فعالشدن مسیرهای عصبی خاصی است که مغز آن را بهعنوان گرمای شدید یا درد تفسیر میکند. مولکول فعال فلفل تند، یعنی کپسایسین، بهعنوان یک ابزار زیستی عمل کرد و به دانشمندان اجازه داد گیرندهای را شناسایی کنند که بهطور طبیعی برای تشخیص گرمای دردناک طراحی شده است. این مسیر پژوهشی در نهایت به شناسایی یک کانال یونی کلیدی منجر شد که بعدها بهعنوان TRPV1 شناخته شد.
TRPV1 یک کانال یونی حساس به گرما است که در نورونهای حسی محیطی بیان میشود و زمانی فعال میگردد که دما به محدودهای برسد که برای بافتها بالقوه آسیبزا است. اهمیت این کشف در آن بود که نشان داد بدن از یک مکانیسم واحد برای تشخیص هم محرک شیمیایی (کپسایسین) و هم محرک فیزیکی (گرما) استفاده میکند. به بیان دیگر، مغز تفاوتی میان «گرمای واقعی» و «گرمای شیمیایی شبیهسازیشده» قائل نمیشود، زیرا هر دو از طریق یک مسیر مولکولی مشترک پردازش میشوند. این یافته برای نخستینبار ثابت کرد که حس دما و درد دارای پایهای مولکولی و قابل شناسایی است.
پس از شناسایی گیرنده گرما، پرسش متقابل بهطور طبیعی مطرح شد: سرما چگونه حس میشود؟ تجربه روزمره انسان از خنکی نعناع یا منتول، سرنخ مهمی در اختیار پژوهشگران قرار داد. همانطور که کپسایسین حس گرما را تقلید میکند، منتول نیز بدون کاهش واقعی دما، احساس سرما ایجاد میکند. این مشاهده به شناسایی کانال یونی دیگری منجر شد که بعدها TRPM8 نام گرفت. این گیرنده در نورونهای حسی فعال است و هم به منتول و هم به دماهای پایین پاسخ میدهد. کشف TRPM8 نشان داد که بدن برای تشخیص گرما و سرما از گیرندههای مجزا اما مفهومی مشابه استفاده میکند و حس دما در واقع حاصل فعالیت مجموعهای از کانالهای یونی تخصصیافته است.
مجموع این یافتهها نشان داد که حس دما یک طیف پیوسته است و نه یک کلید روشن–خاموش ساده. گیرندههای مختلفی وجود دارند که هرکدام در بازه خاصی از دما فعال میشوند و در کنار هم، تجربهای دقیق از سردی، خنکی، گرمی و سوزش دردناک را ایجاد میکنند. این درک مولکولی، مرز میان فیزیولوژی حسی و زیستشناسی سلولی را از میان برداشت و نشان داد که احساسات ذهنی ما ریشهای کاملاً فیزیکی و مولکولی دارند.
در حالی که مسیر مولکولی حس دما تا حد زیادی روشن شده بود، حس لامسه و فشار همچنان یک معمای باز باقی مانده بود. دانشمندان میدانستند که لمس و فشار باعث فعالشدن نورونهای حسی میشود، اما این پرسش اساسی بیپاسخ مانده بود که کدام مولکولها مستقیماً به نیروهای مکانیکی پاسخ میدهند؟ برخلاف دما یا مواد شیمیایی، فشار یک محرک نامرئی است و شناسایی گیرنده آن بهمراتب دشوارتر به نظر میرسید.
پیشرفت واقعی در این حوزه زمانی رخ داد که پژوهشگران بهجای جستوجوی غیرمستقیم، به سراغ سلولهایی رفتند که بهطور ذاتی به تحریک مکانیکی پاسخ میدادند. با اعمال فشارهای بسیار ظریف به غشای این سلولها و ثبت پاسخهای الکتریکی، مشخص شد که باز شدن کانالهای یونی خاصی مسئول این واکنش است. با خاموشکردن تدریجی ژنهای مختلف و بررسی تغییر پاسخ سلولها، در نهایت خانوادهای کاملاً جدید از کانالهای یونی شناسایی شد که بعدها Piezo نام گرفتند.
کشف Piezo1 و Piezo2 نقطه عطفی در زیستشناسی حس لامسه بود. این کانالها بهطور مستقیم به تغییر شکل مکانیکی غشای سلول پاسخ میدهند و با بازشدن خود اجازه ورود یونها را به سلول میدهند. نتیجه این فرایند، ایجاد سیگنال الکتریکی و انتقال اطلاعات لمسی به سیستم عصبی مرکزی است. اهمیت این کشف در آن است که برای نخستینبار نشان داد بدن دارای گیرندههایی است که بهطور مستقیم «نیرو» را حس میکنند، نه پیامدهای ثانویه آن.
نقش این کانالها تنها به پوست محدود نمیشود. مطالعات نشان دادهاند که Piezo1 و Piezo2 در تنظیم عملکردهای حیاتی دیگری مانند فشار خون، تنفس، عملکرد مثانه و حس موقعیت اندامها نیز نقش دارند. این یافتهها نشان میدهد که حس لامسه نهتنها برای درک محیط بیرونی، بلکه برای پایش مداوم وضعیت درونی بدن نیز ضروری است. به این ترتیب، مرز میان حس لامسه و تنظیم فیزیولوژیک درونی عملاً از بین میرود.
در مجموع، کشف کانالهای یونی حساس به دما و فشار نشان داد که حس لامسه و دما بر پایه اصول مشترک مکانوترانسداکشن و الکتروفیزیولوژی بنا شدهاند. محرکهای فیزیکی با تغییر شکل غشای سلول یا فعالسازی مستقیم کانالهای یونی، به سیگنالهای الکتریکی قابل تفسیر برای مغز تبدیل میشوند. این درک مولکولی، نهتنها دیدگاه ما نسبت به حواس را دگرگون کرد، بلکه زمینهساز پیشرفتهای گسترده در علوم اعصاب، پزشکی و فناوریهای زیستالهام شد.
گیرندههای مکانیکی پوست انسان و مسیر عصبی لامسه؛ از سطح پوست تا تجربه آگاهانه لمس
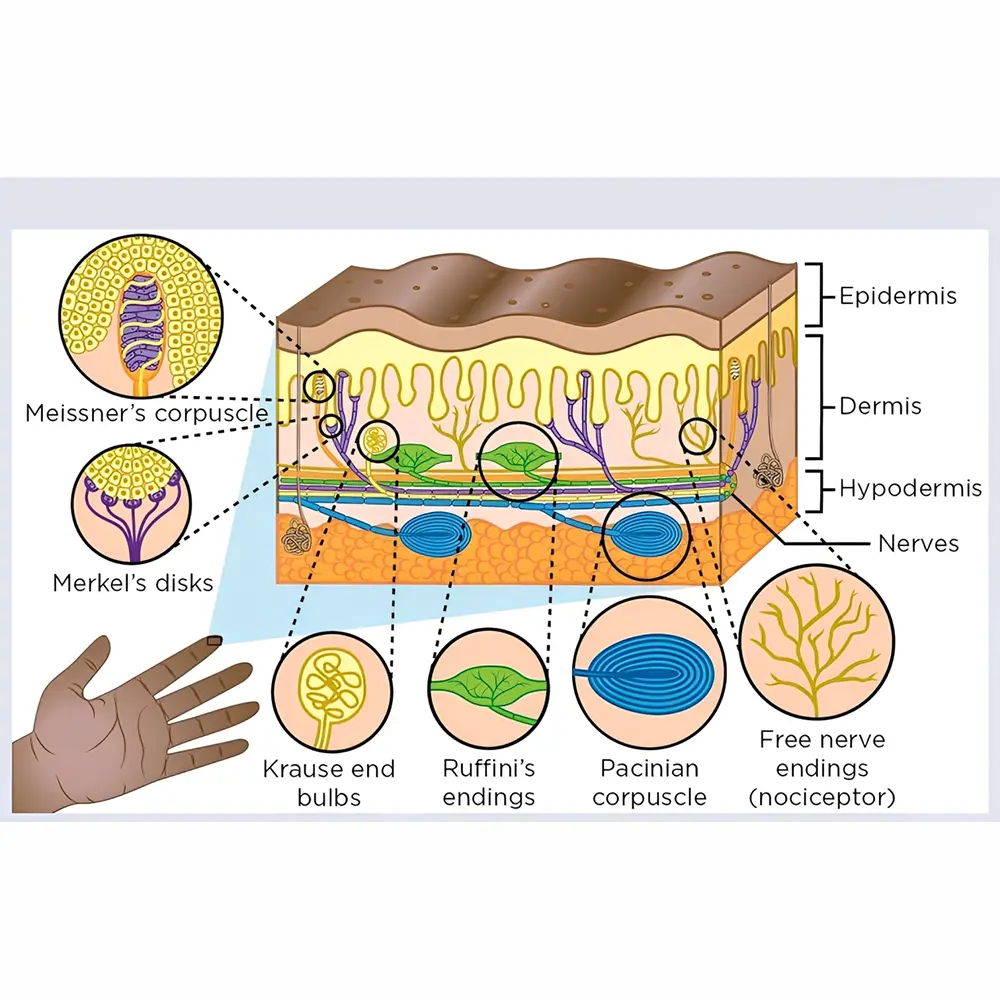
پوست انسان تنها یک پوشش محافظ نیست، بلکه یک اندام حسی پیچیده و فعال به شمار میرود که بهطور مداوم اطلاعات فیزیکی محیط را دریافت و به سیستم عصبی منتقل میکند. هر تماس ساده با یک سطح، مجموعهای از گیرندههای تخصصیافته را فعال میسازد که هرکدام به جنبهای خاص از محرک مکانیکی پاسخ میدهند. این گیرندهها نهتنها شدت تماس را تشخیص میدهند، بلکه قادرند نوع، مدت و حتی الگوی زمانی تحریک را نیز رمزگذاری کنند. به همین دلیل، تجربه لمس انسان بسیار دقیقتر و غنیتر از یک «حس تماس ساده» است.
در لایههای مختلف پوست، گیرندههای مکانیکی متعددی قرار گرفتهاند که هرکدام ویژگیهای ساختاری و عملکردی متفاوتی دارند. برخی از این گیرندهها به تغییرات سریع و گذرا پاسخ میدهند، در حالی که برخی دیگر برای ثبت فشار پایدار و مداوم طراحی شدهاند. این تفاوتها باعث میشود که سیستم لامسه بتواند هم یک تماس کوتاه و گذرا را تشخیص دهد و هم فشاری طولانیمدت را بهدقت پایش کند. بهعبارت دیگر، پوست انسان بهگونهای سازماندهی شده است که هم برای واکنشهای فوری و هم برای تحلیل دقیق محرکها مناسب باشد.
یکی از مهمترین گیرندههای لمسی، سلولهای مرکل هستند که عمدتاً در نواحی حساس مانند نوک انگشتان و لبها یافت میشوند. این گیرندهها به فشارهای پایدار و تغییرات ظریف سطحی پاسخ میدهند و نقش اساسی در تشخیص شکل و بافت اشیا دارند. زمانی که انسان سطح یک جسم را لمس میکند و تفاوت میان زبری و نرمی را درک میکند، بخش قابلتوجهی از این اطلاعات از طریق فعالیت سلولهای مرکل منتقل میشود. ویژگی مهم این گیرندهها آن است که میدان دریافت کوچکی دارند و بنابراین اطلاعات بسیار دقیقی ارائه میدهند.
در کنار این گیرندهها، کورپوسکلهای مایسنر قرار دارند که عمدتاً به تماسهای سبک و لرزشهای با فرکانس پایین پاسخ میدهند. این گیرندهها برای تشخیص تغییرات سریع تماس اهمیت دارند و به انسان اجازه میدهند حرکت اشیا روی سطح پوست را حس کند. عملکرد مایسنرها بهویژه در فعالیتهایی مانند گرفتن اشیای لغزنده یا تشخیص لغزش اولیه یک جسم در دست بسیار حیاتی است. این گیرندهها با پاسخدهی سریع خود، به تنظیم نیروی گرفتن و جلوگیری از افتادن اشیا کمک میکنند.
در لایههای عمیقتر پوست، کورپوسکلهای پاسینی قرار گرفتهاند که به لرزشهای با فرکانس بالا و فشارهای عمیق پاسخ میدهند. این گیرندهها دارای ساختاری پیازیشکل هستند که به آنها اجازه میدهد تغییرات سریع نیرو را تشخیص دهند، حتی زمانی که منبع لرزش در فاصلهای از پوست قرار دارد. به همین دلیل، پاسینیها نقش مهمی در تشخیص ابزارها و ارتعاشات غیرمستقیم ایفا میکنند و به انسان امکان میدهند ویژگیهای فیزیکی اشیایی را که مستقیماً لمس نمیشوند، احساس کند.
پایانههای رافینی نوع دیگری از گیرندههای مکانیکی هستند که به کشش پوست و تغییر شکلهای آهسته پاسخ میدهند. این گیرندهها اطلاعاتی درباره وضعیت و حرکت انگشتان و اندامها فراهم میکنند و نقش مهمی در حس موقعیت بدن دارند. زمانی که پوست کشیده میشود، فعالیت رافینیها به مغز اطلاع میدهد که اندام در چه وضعیتی قرار دارد. این اطلاعات برای هماهنگی حرکات پیچیده و حفظ تعادل بدن ضروری است.
علاوه بر این گیرندههای کلاسیک، فولیکولهای مو نیز دارای پایانههای عصبی حساسی هستند که به حرکت مو واکنش نشان میدهند. این سیستم به انسان اجازه میدهد حتی تماسهای بسیار خفیف، مانند حرکت هوا یا تماس سبک یک شیء، را تشخیص دهد. چنین حساسیتی نشان میدهد که سیستم لامسه برای شناسایی تغییرات بسیار ظریف محیطی نیز بهینه شده است.
نکته مهم در عملکرد همه این گیرندهها، فرایندی به نام مکانوترانسداکشن است. در این فرایند، نیروی مکانیکی واردشده به پوست باعث تغییر شکل غشای سلول یا ساختار گیرنده میشود و این تغییر شکل، کانالهای یونی حساس به مکانیک را باز میکند. ورود یونها به سلول، یک سیگنال الکتریکی ایجاد میکند که شدت آن متناسب با شدت محرک است. اگر این سیگنال به آستانه مشخصی برسد، پتانسیل عمل در فیبر عصبی ایجاد میشود و پیام لمسی به سمت سیستم عصبی مرکزی حرکت میکند. به این ترتیب، فشار فیزیکی به زبان الکتریکی قابل فهم برای مغز ترجمه میشود.
پس از ایجاد سیگنال عصبی، اطلاعات لمسی از طریق فیبرهای عصبی محیطی به نخاع منتقل میشود. بیشتر سیگنالهای لمس دقیق و فشار از طریق فیبرهای سریع هدایتشونده منتقل میشوند که امکان پاسخدهی سریع و دقیق را فراهم میکنند. این سیگنالها سپس وارد مسیرهای عصبی صعودی میشوند که وظیفه رساندن اطلاعات حسی به مغز را بر عهده دارند. سازماندهی این مسیرها بهگونهای است که اطلاعات مربوط به لمس دقیق، فشار و موقعیت بدن بهصورت منظم و تفکیکشده به مراکز بالاتر منتقل شود.
در مغز، نخستین ایستگاه پردازش این اطلاعات تالاموس است که نقش یک مرکز هماهنگکننده و پالایشگر را ایفا میکند. تالاموس سیگنالهای لمسی را بر اساس منبع و نوع آنها ساماندهی کرده و به نواحی قشری مرتبط ارسال میکند. در نهایت، این اطلاعات به قشر حسی اولیه میرسند؛ جایی که نقشهای سازمانیافته از بدن شکل گرفته است و هر ناحیه از پوست به بخش مشخصی از قشر مغز اختصاص دارد. این سازماندهی به مغز اجازه میدهد محل دقیق تماس و ویژگیهای آن را با دقت بالا تشخیص دهد.
فراتر از قشر حسی اولیه، نواحی قشری بالاتری نیز در پردازش لمس نقش دارند که اطلاعات حسی را با تجربههای پیشین، بینایی و برنامهریزی حرکتی ترکیب میکنند. نتیجه این پردازش چندلایه، شکلگیری تجربه آگاهانه لمس است؛ تجربهای که نهتنها شامل حس فیزیکی تماس، بلکه در بسیاری موارد شامل ارزیابی شناختی و حتی عاطفی آن نیز میشود.
در مجموع، سیستم لامسه انسان از مجموعهای هماهنگ از گیرندههای تخصصیافته، مسیرهای عصبی دقیق و مراکز پردازشی پیشرفته تشکیل شده است. این سیستم به بدن اجازه میدهد محیط را با دقت بالا حس کند، به تغییرات آن واکنش نشان دهد و تعامل مؤثری با جهان پیرامون داشته باشد. درک این سازمان پیچیده، نهتنها برای علوم اعصاب و پزشکی اهمیت دارد، بلکه الهامبخش توسعه فناوریهایی است که تلاش میکنند حس لمس را در سامانههای مصنوعی بازآفرینی کنند.
تکامل حس لامسه؛ از مکانوسنسورهای ابتدایی تا پیچیدهترین سیستم حسی در انسان
برای درک جایگاه واقعی حس لامسه در زیستشناسی، باید آن را نهتنها بهعنوان یک توانایی انسانی، بلکه بهعنوان یک پدیده تکاملی بسیار قدیمی بررسی کرد. شواهد موجود نشان میدهد که لامسه احتمالاً نخستین حس تکاملیافته در تاریخ حیات بوده است، زیرا موجودات اولیه برای بقا ناگزیر بودند تغییرات فیزیکی محیط خود را تشخیص دهند. پیش از آنکه نور یا صدا معنای زیستی پیدا کند، تماس، فشار و تغییر شکل محیط، اطلاعات حیاتی درباره ایمنی، منابع و خطرات در اختیار موجودات زنده قرار میداد.
در ابتداییترین اشکال حیات، مانند باکتریها، هنوز سیستم عصبی وجود نداشت، اما حتی در این سطح نیز سازوکارهایی برای تشخیص نیروهای مکانیکی تکامل یافته بود. سلولهای باکتریایی دارای کانالهای یونی حساس به کشش غشایی هستند که زمانی فعال میشوند که غشای سلول در اثر فشار اسمزی یا تماس فیزیکی تغییر شکل دهد. باز شدن این کانالها به باکتری اجازه میدهد بهسرعت به تغییرات محیطی واکنش نشان دهد و از آسیب یا مرگ جلوگیری کند. این مکانیسم ساده اما کارآمد نشان میدهد که مکانوسنسینگ پیش از ظهور سیستم عصبی شکل گرفته است.
با ظهور موجودات چندسلولی ساده، مانند اسفنجها و کیسهداران اولیه، حس لامسه وارد مرحله جدیدی شد. اگرچه این موجودات فاقد مغز یا سیستم عصبی مرکزی هستند، اما سلولهای تخصصیافتهای دارند که به تماس و فشار پاسخ میدهند. این پاسخها اغلب محلی هستند و به شکل انقباض یا تغییر وضعیت بدن بروز میکنند. در این مرحله از تکامل، حس لامسه هنوز بهصورت پراکنده و بدون پردازش مرکزی عمل میکند، اما همین سطح از سازمانیافتگی امکان واکنش هماهنگتری به محیط را فراهم میسازد.
گام مهم بعدی در تکامل لامسه، زمانی برداشته شد که گیرندههای مکانیکی به سلولهای عصبی متصل شدند. در کرمها، بندپایان ابتدایی و نرمتنان، مکانورسپتورها شروع به ارسال سیگنال به شبکههای عصبی ساده کردند. این تغییر باعث شد که پاسخ به لمس دیگر صرفاً یک واکنش موضعی نباشد، بلکه به یک پاسخ هماهنگ در سطح کل بدن تبدیل شود. در این مرحله، لمس نهتنها برای تشخیص تماس، بلکه برای جهتیابی، حرکت هدفمند و اجتناب از خطر نقش ایفا میکرد.
با تکامل مهرهداران، سیستم لامسه دچار جهشی چشمگیر شد. یکی از نمونههای شاخص این جهش، سیستم خط جانبی در ماهیها و دوزیستان آبزی است. این سیستم متشکل از ردیفی از ساختارهای حسی به نام نورومست است که تغییرات جریان آب و فشار را تشخیص میدهند. از طریق این سامانه، ماهیها قادرند حرکت شکارچیان، طعمهها و حتی همنوعان خود را بدون تماس مستقیم احساس کنند. این نمونه نشان میدهد که حس لامسه میتواند از تماس مستقیم فراتر رود و به نوعی «لمس از راه دور» تبدیل شود.
در خزندگان، بهویژه گونههایی که وابستگی زیادی به محیطهای آبی یا نیمهآبی دارند، گیرندههای مکانیکی تخصصیافتهتری تکامل یافتهاند. برای مثال، برخی خزندگان دارای برجستگیهای پوستی حساس به فشار هستند که به آنها اجازه میدهد کوچکترین ارتعاشات محیط را تشخیص دهند. این توانایی بهطور مستقیم با شکار، بقا و تعامل با محیط مرتبط است و نشان میدهد که حس لامسه بهتدریج به یک ابزار پیشرفته برای پردازش اطلاعات محیطی تبدیل شده است.
پرندگان نیز مسیر تکاملی خاص خود را در توسعه لامسه طی کردهاند. اگرچه بدن آنها عمدتاً برای پرواز بهینه شده است، اما گیرندههای مکانیکی خاصی در اطراف پرها و منقار آنها وجود دارد که اطلاعات دقیقی درباره موقعیت پرها، جریان هوا و تماس با اشیا فراهم میکند. این اطلاعات برای حفظ تعادل در پرواز و تعامل دقیق با محیط ضروری است. به این ترتیب، لامسه در پرندگان نهتنها مکمل بینایی است، بلکه در بسیاری موارد نقش مستقلی ایفا میکند.
در پستانداران، حس لامسه به بالاترین سطح پیچیدگی خود میرسد. پوست این جانوران دارای تنوع گستردهای از گیرندههای مکانیکی است و در برخی گونهها، ساختارهای تخصصیافتهای مانند سبیلها یا ویبریسا تکامل یافتهاند. این ساختارها بهعنوان اندامهای لمسی بسیار حساس عمل میکنند و اطلاعات فضایی دقیقی درباره محیط اطراف فراهم میسازند. در مغز پستانداران، بهویژه در گونههایی که به لمس وابستگی بیشتری دارند، نواحی قشری گستردهای به پردازش اطلاعات لمسی اختصاص یافته است که نشاندهنده اهمیت این حس در رفتار و بقا است.
در نهایت، در انسان، تکامل حس لامسه با توسعه قشر مغز و تواناییهای شناختی پیشرفته گره خورده است. لمس در انسان دیگر صرفاً یک ابزار بقا نیست، بلکه به بخشی از تجربه آگاهانه، یادگیری، تعامل اجتماعی و حتی فرهنگ تبدیل شده است. این مسیر تکاملی طولانی نشان میدهد که لامسه از یک مکانیسم ساده تشخیص فشار به یک سامانه پیچیده ادراکی و شناختی ارتقا یافته است؛ سامانهای که هم گذشته تکاملی ما را بازتاب میدهد و هم پایه بسیاری از تواناییهای انسانی را شکل میدهد.
نمونههای شگفتانگیز حس لامسه در جانوران؛ تطبیق حسی با محیط زندگی
حس لامسه در جانوران تنها یک قابلیت عمومی و مشترک نیست، بلکه در هر گونه بهشکلی کاملاً اختصاصی و متناسب با شرایط زیستی، محیطی و رفتاری آن جانور تکامل یافته است. بررسی این تنوع نشان میدهد که لامسه میتواند در برخی گونهها نقش اصلی در ادراک جهان را بر عهده بگیرد و حتی جایگزین نسبی بینایی یا شنوایی شود. در چنین مواردی، ساختارهای لمسی به اندامهای فوقتخصصی تبدیل شدهاند که اطلاعاتی با دقت و سرعتی شگفتانگیز به سیستم عصبی منتقل میکنند.
یکی از برجستهترین نمونهها در قلمرو پستانداران، موش کور ستارهای است که شاید حساسترین سیستم لمسی شناختهشده در دنیای جانوران را داشته باشد. این جانور که در محیطهای تاریک زیرزمینی زندگی میکند، بینی ستارهایشکل خود را که متشکل از ۲۲ زایده گوشتی مملو از گیرندههای مکانیکی است، بهعنوان اندام اصلی ادراک محیط به کار میگیرد. تراکم گیرندههای لمسی در این ساختار بهقدری بالاست که موش کور میتواند طعمه خود را در کسری از ثانیه شناسایی و مصرف کند. در اینجا، لامسه نهتنها جایگزین بینایی شده، بلکه به یک سیستم پردازش فوقسریع اطلاعات محیطی تبدیل شده است.
در پستانداران دریایی، بهویژه فوکهای بندری، حس لامسه مسیر تکاملی متفاوتی را طی کرده است. این جانوران دارای سبیلهایی بسیار حساس هستند که قادرند ردّ جریانهای هیدرودینامیکی باقیمانده از حرکت ماهیها در آب را تشخیص دهند. حتی فوکهایی که بینایی خود را از دست دادهاند، میتوانند تنها با استفاده از این سبیلها مسیر حرکت طعمه را دنبال کنند. نکته شگفتانگیز این است که شکل هندسی خاص این سبیلها باعث کاهش آشفتگی جریان آب ناشی از حرکت خود فوک میشود و در نتیجه، دریافت سیگنالهای محیطی با دقت بالاتری انجام میگیرد. این نمونه نشان میدهد که تکامل حس لامسه میتواند به سطحی برسد که حتی «لمس از راه دور» را ممکن سازد.
در خشکی، فیلها نمونهای منحصربهفرد از توسعه لامسه در مقیاسی کاملاً متفاوت هستند. خرطوم فیل، که ترکیبی از قدرت عضلانی و حساسیت عصبی است، یکی از پیچیدهترین اندامهای لمسی در میان مهرهداران محسوب میشود. این اندام نهتنها قادر است اجسام بسیار سنگین را جابهجا کند، بلکه میتواند تفاوتهای بسیار ظریف در بافت، فشار و حتی اندازه را تشخیص دهد. تراکم بالای فیبرهای عصبی در خرطوم و ارتباط مستقیم آن با مراکز پردازش حسی در مغز، باعث شده است که فیلها بتوانند از این اندام هم برای تعامل فیزیکی با محیط و هم برای ارتباط اجتماعی با همنوعان خود استفاده کنند. در اینجا، لامسه به ابزاری چندمنظوره برای بقا، شناخت و ارتباط تبدیل شده است.
در پرندگان، با وجود آنکه پرواز و بینایی نقش محوری دارند، حس لامسه بههیچوجه نادیده گرفته نشده است. منقار بسیاری از پرندگان، بهویژه گونههای آبزی و ساحلی، مملو از گیرندههای مکانیکی تخصصیافته است که امکان تشخیص ارتعاشات بسیار ظریف در خاک، آب یا گل را فراهم میکند. برخی پرندگان قادرند بدون تماس مستقیم با طعمه، تنها از طریق تغییرات فشار و جریان محیط اطراف، حضور آن را شناسایی کنند. این توانایی که گاه به آن «لمس از راه دور» گفته میشود، نمونهای دیگر از انعطافپذیری تکاملی سیستم لمسی در پاسخ به نیازهای زیستی خاص است.
در پستانداران پرنده مانند خفاشها نیز حس لامسه نقش مکملی حیاتی ایفا میکند. اگرچه خفاشها به سیستم پیچیده جهتیابی صوتی مشهورند، اما بالهای نازک و غشایی آنها پوشیده از موهای حساس به لمس است که تغییرات جریان هوا را تشخیص میدهد. این اطلاعات لمسی به خفاش کمک میکند مسیر پرواز خود را با دقت بالا تنظیم کند و از برخورد با موانع جلوگیری نماید. در این حالت، لامسه بهعنوان یک سیستم بازخورد لحظهای برای کنترل حرکات سریع و پیچیده عمل میکند.
حتی در بندپایان و حشرات، حس لامسه به اشکالی شگفتآور تکامل یافته است. موهای بسیار ظریف روی پاها یا بدن برخی حشرات میتوانند ارتعاشات هوا یا زمین را با حساسیتی تشخیص دهند که گاه انرژی لازم برای تحریک آنها با انرژی حرارتی مولکولها قابل مقایسه است. این سطح از حساسیت به شکارچی یا طعمه اجازه میدهد حضور یکدیگر را پیش از تماس مستقیم احساس کنند و واکنش مناسب نشان دهند. در چنین سیستمهایی، لامسه به معنای واقعی کلمه خط مقدم تعامل با محیط محسوب میشود.
در مجموع، بررسی نمونههای گوناگون حس لامسه در جانوران نشان میدهد که این حس نهتنها قدیمیترین، بلکه یکی از منعطفترین سامانههای حسی در فرایند تکامل است. هر گونه، متناسب با زیستگاه، سبک زندگی و چالشهای محیطی خود، نسخهای خاص از لامسه را توسعه داده است؛ نسخهای که گاه به ابزار اصلی ادراک جهان تبدیل شده و گاه بهصورت هوشمندانهای با سایر حواس ترکیب شده است. این تنوع شگفتانگیز، الهامبخش بسیاری از پژوهشهای بایومیمتیک معاصر بوده و نشان میدهد که مطالعه لامسه در جانوران، نهتنها درک ما از زیستشناسی را عمیقتر میکند، بلکه مسیرهای تازهای برای طراحی فناوریهای آینده میگشاید.
لمس اجتماعی، لمس عاطفی و نقش آن در رشد مغز انسان
لمس اجتماعی و لمس عاطفی بُعدی از حس لامسه را شکل میدهند که فراتر از تشخیص فیزیکی تماس، به تجربههای هیجانی، پیوند اجتماعی و رشد عصبی معنا میبخشند. در این چارچوب، لمس دیگر صرفاً انتقال فشار یا ارتعاش نیست، بلکه حامل پیامهای زیستی درباره امنیت، تعلق، آرامش و ارتباط است. آنچه این نوع لمس را متمایز میکند، اتکای آن به مسیرهای عصبی خاص و پاسخهای نوروشیمیایی است که مستقیماً با تنظیم استرس، شکلگیری دلبستگی و بلوغ شبکههای مغزی در تعاملاند.
از منظر عصبزیستی، لمس عاطفی بهطور برجسته با فیبرهای C-tactile (CT) مرتبط است؛ فیبرهایی بدون میلین که به لمس ملایم، آهسته و نوازشگونه پاسخ میدهند و بیشتر در پوستهای نرم بدن مانند بازو و تنه پراکندهاند. این فیبرها سیگنالهای خود را نه فقط به قشر حسیپیکری اولیه، بلکه به شبکههایی مرتبط با پردازش هیجانی و پاداش منتقل میکنند. در نتیجه، لمس CT بهطور طبیعی با احساس خوشایندی، کاهش برانگیختگی استرسی و تقویت پیوند اجتماعی همراه میشود. این سازمانیافتگی عصبی نشان میدهد که طبیعت لمس اجتماعی را بهعنوان یک «کانال ارتباطی عاطفی» مستقل و هدفمند طراحی کرده است.
اهمیت لمس اجتماعی از نخستین مراحل زندگی آغاز میشود و حتی پیش از تولد قابل مشاهده است. در اواخر دوران بارداری، جنینها به تحریکهای لمسی مادر واکنش نشان میدهند و این تجربههای ریتمیک میتوانند زمینهای برای تنظیمهای بعدی سیستمهای حسی و هیجانی فراهم کنند. پس از تولد، تماس پوست با پوست، نوازش و حمل نوزاد نقش تعیینکنندهای در آرامسازی، تنظیم ضربان قلب و کاهش پاسخهای استرسی ایفا میکند. این اثرات از طریق محور هیپوتالاموس–هیپوفیز–آدرنال (HPA) و آزادسازی هورمونهایی مانند اکسیتوسین میانجیگری میشوند؛ هورمونی که بهطور مستقیم با دلبستگی، اعتماد و پیوند اجتماعی مرتبط است.
در دوران نوزادی، لمس مراقبتی نهتنها احساس امنیت را تقویت میکند، بلکه بهصورت عمیقتری بر سازمانیابی قشر مغز اثر میگذارد. مطالعات نشان دادهاند که تماسهای لمسی پرورشی با افزایش تراکم اتصالات در قشر سوماتوسنسوری و بهبود پاسخهای تنظیمی به استرس همراه است. این تأثیرات میتوانند پایدار باشند و بهصورت اپیژنتیکی مسیرهای رشد عصبی را تعدیل کنند. بهبیان دیگر، کیفیت و کمیت لمس در اوایل زندگی، نقشی سازنده در معماری مغز ایفا میکند و پیامدهای آن تا بزرگسالی امتداد مییابد.
ابعاد اجتماعی لمس محدود به رابطه والد–نوزاد نمیماند و در طول رشد، شکلها و کارکردهای متنوعی به خود میگیرد. در کودکی و نوجوانی، لمس در تعاملات خانوادگی، بازی با همسالان و موقعیتهای آموزشی به تنظیم هیجانی، یادگیری اجتماعی و تقویت ارتباطات کمک میکند. همزمان، مغز بهتدریج الگوهای لمسی را با زمینههای اجتماعی متفاوت همتراز میسازد و مرزهای مناسب تماس را میآموزد. این فرایند نشان میدهد که لمس اجتماعی نهفقط یک ورودی حسی، بلکه یک مهارت شناختی–هیجانی آموختنی است.
در بزرگسالی نیز لمس عاطفی همچنان نقش مهمی در سلامت روان و روابط اجتماعی ایفا میکند. لمسهای ملایم و هدفمند میتوانند شبکههای پاداش عصبی را فعال کنند، اضطراب را کاهش دهند و احساس پیوند را تقویت نمایند؛ حتی زمانی که تماس ماهیت غیررمانتیک دارد. این یافتهها تأکید میکنند که ارزش لمس اجتماعی به بافت رابطه و کیفیت تماس وابسته است، نه صرفاً به حضور فیزیکی لمس. در همین راستا، کاهش یا محرومیت از لمس مثبت میتواند با افزایش آسیبپذیری هیجانی و اختلال در تنظیم استرس همراه شود.
نکته مهم دیگر، چندحسیبودن تجربه لمس اجتماعی است. لمس عاطفی اغلب با ورودیهای دهلیزی و پروپریوسپتیو (مانند تکاندادن، در آغوش گرفتن و حملکردن) همراه میشود و این همافزایی حسی میتواند اثرات آرامبخش و یادگیری تداعیای را تقویت کند. چنین همافزاییای به مغز کمک میکند الگوهای پاداش اجتماعی را تثبیت کند و پاسخهای سازگارانهتری به تعاملات انسانی شکل دهد.
در مجموع، لمس اجتماعی و عاطفی را باید بهعنوان یکی از ستونهای رشد سالم مغز انسان در نظر گرفت؛ ستونی که از تنظیم استرس و شکلگیری دلبستگی آغاز میشود و تا ارتقای روابط اجتماعی و سلامت روان در سراسر عمر ادامه مییابد. این بُعد از لامسه نشان میدهد که تماس انسانی، افزون بر کارکردهای حسی، حامل معناهای عمیق زیستی و شناختی است و فهم دقیق آن نهتنها برای علوم اعصاب و روانشناسی، بلکه برای طراحی مداخلات درمانی، آموزشی و حتی فناوریهای الهامگرفته از زیست اهمیت بنیادین دارد.
الهام از حس لامسه در بایومیمتیک و فناوریهای نوین
حس لامسه فقط یک «حس ساده» نیست؛ یک سیستم هوشمند پردازش اطلاعات است که همزمان فشار، کشش، دما، لرزش و حتی کیفیت بافت را دریافت میکند و در کسری از ثانیه آن را به تصمیم حرکتی یا واکنش عاطفی تبدیل میسازد. وقتی مهندسان به سراغ «بایومیمتیک» میروند، دقیقاً همین منطق را از طبیعت قرض میگیرند: اینکه یک سطح نرم و زنده بتواند اطلاعات چندگانه را یکپارچه کند، در تماسهای ریز حساس باشد، در تماسهای شدید مقاوم بماند و در نهایت خروجی را به زبان ماشین، یعنی سیگنالهای الکتریکی قابل تحلیل، ترجمه کند. به همین دلیل است که در فناوریهای نوین، الهام از لامسه بیشتر از هر چیز به سه مسیر اصلی تبدیل شده: پوستهای الکترونیکی، رباتهای دارای بازخورد لمسی و پروتزهایی که حس را برمیگردانند؛ و در کنار آنها، نسل جدید حسگرهای پوشیدنی، حسگرهای نانومکانیکی و حسگرهای چندحسی شکل گرفتهاند که همگی تلاش میکنند «تماس» را مثل انسان بفهمند، نه فقط اندازهگیری کنند.
۱) پوست الکترونیکی (Electronic Skin / E-Skin): تبدیل تماس به داده
یکی از برجستهترین حوزههای الهامگرفته از حس لامسه، طراحی پوست الکترونیکی یا E-Skin است؛ فناوریای که هدفش شبیهسازی فشار، دما و بافت برای ایجاد تعاملهای طبیعیتر در رباتها و پروتزها است. در مثال ارائهشده از پژوهشهای دانشگاههای هاروارد و MIT، یک E-Skin انعطافپذیر با استفاده از نانوذرات طلا و نانوسیمهای سیلیکونی ساخته شده که با منطق عملکردی مشابه ساختارهای حسگر در پوست انسان، قادر است فشارهای بسیار کوچک را حتی در مقیاس کمتر از ۱۰ پاسکال تشخیص دهد. این سطح از حساسیت یعنی ربات یا پروتز میتواند تماسهای ظریف را هم حس کند؛ تماسهایی که در دنیای واقعی تفاوت بین «گرفتن آرام» و «له کردن» را رقم میزنند.
در منطق طراحی E-Skin، سه عنصر کلیدی که در متن شما آمده، نقش ستون فقرات را بازی میکنند: نخست لایههای نازک پلیمرهای الاستومر که برای ایجاد انعطافپذیری و رفتار شبیه پوست به کار میروند؛ دوم شبکههای نانوذرات رسانا که فشار و تغییر شکل را به تغییر جریان/مقاومت الکتریکی تبدیل میکنند؛ و سوم اتصال به سیستمهای پردازش سریع داده که امکان تحلیل بلادرنگ سیگنالها را فراهم میسازد. حاصل این معماری در کاربردهای واقعی، بسیار تعیینکننده است؛ چون E-Skin فقط یک حسگر نیست، بلکه یک «پوست دادهساز» است که میتواند در رباتیک پزشکی، لامسه پروتزیها، جراحی دقیق و حتی تجهیزات ایمنی برای تشخیص تغییرات محیطی استفاده شود و نقش «حس ششم» را برای سیستمهای مصنوعی بازی کند.
۲) دستهای رباتیک با بازخورد لمسی (Haptic Feedback): وقتی ربات فقط حرکت نمیکند، حس میکند
اگر ربات قرار باشد در جهان واقعی کار کند—از دستکاری ابزارهای ظریف گرفته تا جراحی از راه دور—دیگر فقط دقت موقعیتیابی کافی نیست؛ ربات باید بفهمد چه مقدار نیرو وارد میکند، سطح چقدر سخت است و تماس چه تغییری کرده است. در نمونهای که آوردهاید، شرکت Shadow Robot دستهای رباتیکی ساخته که با حسگرهای فشاری پیزورزیستیو (Piezoresistive) نیروی واردشده به هر انگشت را اندازه میگیرند و سپس به اپراتور انسانی بازخورد لمسی (Haptic Feedback) میدهند. این یعنی یک حلقهٔ کامل حس–عمل شکل میگیرد: ربات لمس میکند، اندازه میگیرد، و به انسان «احساس قابل درک» برمیگرداند تا کنترل دقیقتر شود.
در اینجا الهامگیری از زیستشناسی، دقیقاً از همان چیزی میآید که در پوست انسان رخ میدهد: وجود انواع گیرندههایی که فشار و ارتعاش را تشخیص میدهند و ترکیب این اطلاعات را به مغز میفرستند. متن شما همچنین به یک کاربرد انسانی–فناورانه اشاره میکند که بار عاطفی دارد: تجربهٔ واقعیت مجازی که در آن، مادر میتواند با کمک دستکشهای ویژه لمس را تجربه کند و با یک بازنمایی مجازی تعامل داشته باشد. فارغ از جنبهٔ احساسی، این مثال از نظر فناوری نشان میدهد مسیر تکامل سامانههای لمسی صرفاً صنعتی نیست؛ بلکه به سمت ساخت تجربههای «قابل لمس» در محیطهای دیجیتال هم میرود، یعنی جایی که لمس، به زبان داده ترجمه و دوباره به شکل حس قابل تجربه بازسازی میشود.
۳) حسگرهای بافت و فشار در پروتزهای مدرن: بازگرداندن حس به کاربر
پروتزهای پیشرفته امروز دیگر فقط به دنبال تقلید حرکت نیستند؛ هدف بزرگتر این است که «حس لامسه» هم به کاربر برگردد تا کنترل طبیعیتر شود. در مثال شما، DEKA Arm یا “Luke Arm” پروتزی است که حسگرهای فشار و نیرو دارد و به کاربر کمک میکند میزان نیروی لازم برای گرفتن اشیاء را تجربه کند؛ مثلاً بتواند یک جسم شکننده مثل تخممرغ را بگیرد بدون اینکه آن را بشکند. اینجا فناوری به یک نقطه حساس وارد میشود: تبدیل سیگنال فشار به یک بازخورد قابل فهم برای انسان، که معمولاً با حسگرهای کاپاسیتیو و فشارسنجهای پیزوالکتریک در کنار نرمافزار پردازش سیگنال انجام میشود. برای نزدیکتر شدن به رفتار پوست، از پوشش سیلیکونی هم استفاده میشود تا هم توزیع فشار بهتر شود و هم تماس طبیعیتر حس شود.
چنین طراحیهایی مستقیماً با حوزههایی که شما نام بردهاید گره میخورند: توانبخشی بیماران قطع عضو، بهبود کنترل در جراحی و کارهای دقیق و حتی ارتقای مهارتهای حرکتی در محیطهای صنعتی. این یعنی پروتزِ «حسدار» فقط یک ابزار نیست؛ یک واسط حسی–حرکتی است که میتواند کیفیت زندگی را تغییر دهد.
۴) حسگرهای انعطافپذیر پوشیدنی: پوستِ دوم برای پایش بدن و تعامل دیجیتال
وقتی منطق پوست انسان—یعنی انعطاف، تطابق با سطح و حساسیت—به مهندسی وارد میشود، نتیجه فقط پروتز و ربات نیست؛ بلکه حسگرهای پوشیدنی هستند که روی بدن مینشینند و فشار، دما، رطوبت یا ارتعاش را ثبت میکنند. در مثال شما، حسگری ساخته شده که روی انگشتان یا کف دست قرار میگیرد و میتواند سطح و بافت اشیاء را تشخیص دهد و برای کاربردهایی مثل واقعیت مجازی، آموزش پزشکی و کنترل رباتها مفید باشد. در این مسیر هم همان سهگانهٔ طراحی تکرار میشود: پلیمرهای رسانا و الاستومر برای نرمی و انعطاف، شبکههای نانوسیمی برای افزایش حساسیت، و سازگاری با پردازشگرهای کوچک برای تحلیل سریع سیگنال.
۵) فناوریهای نانومکانیکی: دیدنِ نیروهای بسیار کوچک در مقیاس نانو
در سطح پیشرفتهتر، مهندسان از منطق ساختارهای بسیار ریز در پوست و بافتها الهام میگیرند تا حسگرهایی بسازند که حتی لرزشها و نیروهای زیرمیکرونی را ثبت کنند. نمونهای که ذکر کردهاید حسگرهای پیزوالکتریک نانوذرهای است که میتواند تغییرات بسیار کوچک بافت را تشخیص دهد. چنین حسگرهایی معمولاً در جاهایی میدرخشند که کیفیت سطح یا سلامت ساختاری اهمیت دارد؛ مثل نظارت صنعتی بر کیفیت سطح مواد یا تشخیص ترکها و نقصهای بسیار کوچک و البته در برخی کاربردهای پزشکی و رباتیک که لمس فوقالعاده ظریف لازم است.
۶) حسگرهای چندحسی (Multimodal): تقلید از هوش ترکیبی پوست انسان
پوست انسان فقط فشار را نمیفهمد یا فقط دما را اندازه نمیگیرد؛ اطلاعات را ترکیب میکند و «معنا» میسازد. همین ویژگی باعث شده مسیر مهم دیگر، ساخت حسگرهای چندحسی باشد که همزمان چند نوع محرک را ثبت میکنند. در نمونهای که شما آوردهاید، حسگرهای لایهای میتوانند فشار، دما و رطوبت را با هم اندازهگیری کنند و در طراحی آنها از ترکیب پلیمرهای رسانا، گرافن و نانوسیمها استفاده میشود. ارزش این رویکرد در رباتیک و پروتز واضح است: دست رباتیک وقتی واقعاً شبیه دست انسان میشود که بتواند همزمان «فشار تماس»، «تغییر دما» و «شرایط سطح» را بفهمد؛ مخصوصاً در کار با غذا، اشیای ظریف یا ابزارهای حساس.
۷) الهام از بافت حیوانی: وقتی طبیعت، کتاب راهنمای افزایش حساسیت میشود
یکی از جذابترین بخشهای بایومیمتیک این است که مهندسان فقط از انسان تقلید نمیکنند؛ از حیوانات هم الهام میگیرند، چون هر گونه متناسب با محیط خود، حس لامسه را تخصصی کرده است. شما به چند الهام کاربردی اشاره کردهاید: از پوست پرندگان برای مدلسازی تشخیص ارتعاشات هوایی و فشار باد در رباتهای پرنده، از ساختارهای حساس شبیه پنجه گربه و خفاش برای طراحی میکروسنسورهای ارتعاشی، و از شیارها و برجستگیهای انگشت انسان برای ساخت حسگرهای پلیمری شیاردار که بتوانند اصطکاک و بافت را بهتر شبیهسازی کنند. در واقع، طبیعت این پیام را میدهد که افزایش حساسیت فقط با «حساستر کردن ماده» رخ نمیدهد، بلکه با معماری سطح، توزیع نیرو و الگوی تماس تقویت میشود—چیزی که در پوست حیوانات و انگشتان انسان بهوضوح دیده میشود.
پوست الکترونیکی (E-Skin) و آیندهٔ تعامل انسان–ماشین
پوست الکترونیکی برای حسگرهای کشش، فشار و دما (Electronic Skin for Strain, Pressure and Temperature Sensing)
پوست الکترونیکی یا E-Skin نسل تازهای از سامانههای الکترونیک زیستیِ انعطافپذیر است که تلاش میکند همزمان دو ویژگی را کنار هم بیاورد: از یکسو نرمی، کشسانی و شکلپذیری نزدیک به پوست انسان و از سوی دیگر قابلیت حسگری دقیق برای ثبت محرکهای کلیدی مانند کشش، فشار و دما. همین ترکیب است که E-Skin را به یک فناوری تحولآفرین برای روباتیک، ابزارهای پوشیدنی، پروتزهای هوشمند و مراقبتهای پزشکی تبدیل میکند، چون تعامل انسان–ماشین فقط با «حرکت» کامل نمیشود؛ ماشین باید بتواند تماس را هم بفهمد، آن را تفسیر کند و در پاسخ، رفتار خود را تنظیم کند.
با وجود این افق جذاب، توسعهٔ E-Skin با چند مانع جدی روبهروست. نخست، ساخت مادهای که واقعاً بادوام باشد اما در عین حال انعطاف و کشسانی مشابه پوست را حفظ کند؛ چون بسیاری از سامانههای موجود یا در حسگری عالیاند ولی از نظر مکانیکی بیش از حد سخت هستند، یا اگر نرم باشند، در برابر تغییر شکلهای تکرارشونده کارایی پایدار ندارند. دوم، ادغام چندحسگری زیستی در یک پلتفرم واحد است؛ یعنی دستگاه باید بتواند در کنار هم کشش + فشار + دما را بهصورت قابل اعتماد ثبت کند، نه اینکه هر کدام را جداگانه و با معماریهای ناسازگار انجام دهد. چالش سوم، مسئلهٔ ساخت و تولید است: برای کاربردهای پوشیدنی یا حتی کاشتنی، فناوری باید به سمت روشهایی برود که شکلدهی دقیق، تکرارپذیر و قابل مقیاس داشته باشند؛ و در این میان، چاپ سهبعدی یک گزینهٔ کلیدی محسوب میشود.
در میان مواد پیشنهادی، هیدروژلها یک مزیت ذاتی دارند: آنها به دلیل نرمی و کشسانی نزدیک به بافت، امکان ایجاد یک اتصال «بیدرز» بین دستگاه و پوست را فراهم میکنند. در نتیجه، مقاومت بینسطحی (interfacial resistance) و آرتیفکتهای ناشی از حرکت (movement artifacts) کاهش پیدا میکند و ارتباط بافت–دستگاه پایدارتر میشود. با این حال، بسیاری از هیدروژلهای تکپیوندی از نظر مکانیکی کافی نیستند و در کشسانی و حساسیت محدودیت ایجاد میکنند؛ به همین دلیل است که صرفاً «افزودن مواد رسانا» به هیدروژل، بهتنهایی تضمین نمیکند یک پوست الکترونیکی واقعاً شبیه پوست انسان ساخته شود. از طرف دیگر، بخشی از الکترونیکهای انعطافپذیر گزارششده در ادبیات، بهدلیل سختی زیاد و ناهماهنگی مکانیکی در رابط زیستی–غیرازیستی (گاهی با پروفایلهای تنشی در محدودهٔ ۱۰ تا ۱۰۰ مگاپاسکال) در شبیهسازی رفتار مکانیکی پوست انسان ناکافی عمل میکنند. بنابراین، مسئله فقط حسگر نیست؛ مسئله منطق طراحی ماده است.
در این چارچوب، رویکردی که در محتوای شما توضیح داده شده، یک پاسخ مهندسی دقیق به همین گرههاست: طراحی یک پوست الکترونیکی چاپ سهبعدی مبتنی بر هیدروژلهای نانومهندسیشده که قابلیتهای حسگری الکترونیکی و حرارتی قابل تنظیم دارند. نقطهٔ شروع این طراحی، بهرهبردن از رفتار کاهش ویسکوزیته تحت برش (shear-thinning) در پیشمادههای هیدروژل است؛ یعنی جوهر هیدروژلی هنگام اعمال برش (در نازل چاپگر) روانتر میشود و پس از خروج، دوباره قوام میگیرد و سازهٔ دوبعدی یا سهبعدی را با دقت شکل میدهد. این ویژگی، برای ساخت ساختارهای پیچیدهٔ E-Skin که باید هم نازک و هم قابل کشش باشند، حیاتی است و عملاً چاپ سهبعدی را از «ایده» به «امکان ساخت واقعی» تبدیل میکند.
هستهٔ بیومتریال این سامانه، پولولان (Pullulan) است؛ یک پلیساکارید قارچی مورد تأیید FDA که با افزودن گروههای تیول به شکل Pul-SH در آمده تا بتواند وارد واکنشهای شبکهسازی هدفمند شود. این انتخاب از نظر مهندسی کاربردی مهم است، چون پولولان هم زیستسازگار است و هم با اصلاح شیمیایی، میتواند به یک چارچوب شبکهای مقاوم تبدیل شود. برای رسانایی و نقش پیونددهنده، از نانومواد دوبعدی گروه TMDs استفاده شده و در میان آنها دیسولفید مولیبدن (MoS₂) بهعنوان عنصر کلیدی انتخاب شده است. نکتهٔ محوری اینجاست که MoS₂ به صورت «پر نقص» طراحی شده؛ یعنی با ایجاد نقصهای گوگردی (sulfur vacancies) هیدروفیلیت و قابلیت پیونددهی آن بالا میرود و همین نقصها، مسیر را برای ژلاسیون مبتنی بر نقص و شبکهسازی کارآمدتر با Pul-SH هموار میکنند. حاصل این ترکیب، یک هیدروژل رسانا با معماری مناسب برای ساخت E-Skin است، نه صرفاً یک هیدروژل «دوپشده» با رسانایی محدود.
برای حل یکی از حساسترین نیازهای کاربردی E-Skin—یعنی چسبندگی پایدار روی بافت مرطوب—به این شبکه نانوذرات پلیدوپامین (PDA) اضافه شده است. PDA نقش «چسب زیستی» را بازی میکند و علاوه بر افزایش چسبندگی، درون شبکه هم مشارکت فعال دارد: بین گروههای -SH پولولان و گروههای کاتکول PDA، از طریق واکنش افزایشی مایکل (Michael addition) یک شبکهٔ پیوند ثانویه شکل میگیرد. این یعنی PDA فقط یک افزودنی سطحی نیست؛ بخشی از منطق شبکهسازی و تقویت مکانیکی/عملکردی سیستم است. سپس برای تکمیل معماری، یک شبکهٔ سوم با استفاده از سدیم تریمتافسفات (STMP) اضافه میشود تا اتصالهای یونی/شیمیایی دیگری بین زنجیرههای پولولان ایجاد شود. نتیجه، یک استراتژی سهپیوندی (triple-crosslinking) است که سه مکانیزم مجزا را یکجا ترکیب میکند: ژلاسیون مبتنی بر نقص + واکنش مایکل + پیونددهی یونی. خروجی این معماری، هیدروژلی است که هم الاستیک و پایدار مکانیکی است و هم رسانا و چسبنده—دقیقاً همان چهارضلعیِ سختِ موردنیاز برای E-Skin واقعی.
از نظر «رفتار ساخت»، این سامانه طوری طراحی شده که پیشمادهٔ Pul-SH وقتی با MoS₂ و PDA ترکیب میشود، حالت ویسکوالاستیک پیدا کند؛ یعنی هم مثل مایع جریانپذیر باشد و هم مثل جامد، شکل را حفظ کند. این ویژگی همان چیزی است که چاپ سهبعدی را ممکن میکند، چون جوهر باید از نازل عبور کند اما پس از خروج، نباید فروبریزد. دادههای شما نشان میدهد ژلاسیون بدون حضور MoS₂ و PDA اتفاق نمیافتد و با افزودن این اجزا، تشکیل شبکه به شکل واضح رخ میدهد و حتی وقتی هر دو (MoS₂ و PDA) حاضرند، ژلاسیون سریعتر هم میشود. در همین راستا، یکی از نکات کاربردی بسیار مهم این است که این جوهر میتواند از سوزن ۲۷G هم عبور کند و ژلاسیون درجا (in-situ gelation) داشته باشد؛ یعنی مسیر برای ساخت دستگاههای «تزریقی» یا سازههایی که روی بدن شکل میگیرند هم باز میشود—یک ویژگی ارزشمند برای آیندهٔ پوشیدنیها و حتی برخی سناریوهای کاشتنی.
از نظر مکانیک، محتوای شما یک تصویر روشن از «تنظیمپذیری» ارائه میدهد. در آزمون کشش، هیدروژل Pul-SH/2wt.%PDA/1wt.%MoS₂ رفتار کشسانی قابل توجهی نشان میدهد و گزارش شده که تا حدود ۹۰٪ کرنش را تحمل میکند و مدول یانگ حدود 42 kPa دارد؛ عددی که در محدودهٔ بافتهای فیزیولوژیک نرم معنا پیدا میکند و از نظر سازگاری مکانیکی با پوست، امیدوارکننده است. نکتهٔ مهمتر این است که غلظت MoS₂ فقط «رسانایی» را تنظیم نمیکند؛ روی یکپارچگی شبکه و شکست هم اثر میگذارد، بهطوری که کاهش یا افزایش بیش از حد MoS₂ میتواند به ایجاد نقصهای شبکهای و شکست در کرنشهای پایینتر منجر شود. در آزمون فشردگی هم، نمونهٔ هیدروژل گزارش شده میتواند تا ۸۰٪ فشردگی را تحمل کند و در چرخههای متعدد با کرنشهای مختلف، به شکل اولیه بازگردد؛ چنین بازگشتپذیری برای E-Skin حیاتی است، چون پوست الکترونیکی در استفادهٔ واقعی دائماً تحت فشردگی، خمشدن و پیچش قرار میگیرد و اگر «خستگی مکانیکی» سریع رخ دهد، حسگر هم دچار رانش سیگنال میشود.
چسبندگی، بخش دیگری از «واقعی شدن» E-Skin است. طبق توضیحات شما، حضور PDA باعث میشود هیدروژل بتواند به طیفی از سطوح—از فلز و پلاستیک و لاستیک و شیشه تا پوست انسان—بچسبد. این ویژگی فقط برای راحتی نیست؛ در سامانههای پوشیدنی، چسبندگی ضعیف یعنی حرکت نسبی حسگر و پوست، یعنی آرتیفکت، یعنی دادهٔ غیرقابل اعتماد. بنابراین چسبندگی به بافت مرطوب در این طراحی یک ویژگی لوکس نیست؛ یک نیاز بنیادی است که مستقیم روی کیفیت حسگری اثر میگذارد.
اما نقطهٔ اوج این بخش، تبدیل این «مادهٔ خوب» به «حسگر واقعی» است؛ یعنی اینکه شبکهٔ رسانا بتواند تغییر شکل را به سیگنال قابل اندازهگیری تبدیل کند. در پلتفرم شما، معیار کلیدی تغییرات مقاومت نسبی (ΔR/R0) است که در چرخههای فشردگی متعدد و در پاسخ به فشار/کرنشهای مختلف، رفتار قابل ردیابی نشان میدهد. این یعنی E-Skin میتواند هم کرنش پویا را ثبت کند و هم فشار پویا را، و حتی تغییرات ظریف مثل دمیدن هوا، تماسهای سبک و لرزشها را تشخیص دهد. نمونههای کاربردی که در محتوای شما آمده—مانند تشخیص خمشدن در زوایای مختلف، پیچشهای متوالی، ثبت الگوهای لمس و حتی امکان تشخیص لرزشهای تار صوتی—نشان میدهد این پوست الکترونیکی فقط برای «اندازهگیری آزمایشگاهی» نیست، بلکه قابلیت نقشآفرینی بهعنوان ردیاب حرکت انسان، پلتفرم تشخیص صدا و صفحه لمسی انعطافپذیر را دارد.
حس دما نیز به شکل یکپارچه وارد همین پلتفرم شده است؛ یعنی همان هدف بزرگ چندحسگری در یک سامانه. برای کاهش اتلاف حرارت به محیط و بهبود اندازهگیری، هیدروژل چاپ شده بین دو لایهٔ نازک PDMS قرار داده شده و پاسخ حرارتی در بازهای وسیع به صورت خطی گزارش شده است. در بخش دینامیک پاسخ، نکتهای که مطرح کردهاید مهم است: زمان پاسخ به منبع گرم سریعتر و به منبع سرد آهستهتر گزارش شده، و این رفتار میتواند در طراحی الگوریتمهای تفسیر سیگنال و کالیبراسیون دستگاه در کاربرد واقعی معنی پیدا کند. از نظر کاربرد پزشکی/پوشیدنی، توانایی ثبت محدودهٔ تب انسان (به صورت گزارششده در متن شما) و مهمتر از آن، قابلیت چسبیدن conformal روی سطوح منحنی بدن، تفاوت E-Skin با حسگرهای سخت سنتی را پررنگ میکند؛ چون اندازهگیری دما روی پوست، بدون تماس خوب و یکنواخت، معمولاً نویز و خطا دارد.
از منظر ساخت و نمایش عملکرد الکتریکی، شما به نقطهای اشاره کردهاید که برای روایت فناوری خیلی جذاب است: اتصال سازهٔ چاپشده به منبع DC و روشن کردن LED برای نشان دادن «رسانایی عملی». این نوع نمایشها معمولاً کمک میکند مخاطب سریعتر بفهمد که رسانایی فقط روی کاغذ نیست، بلکه در یک سناریوی واقعی هم کار میکند. در کنار آن، طیفسنجی امپدانس (EIS) نشان داده که افزایش MoS₂ تا یک مقدار به کاهش مقاومت و افزایش هدایت کمک میکند و سپس به سمت حالت اشباع میرود؛ یعنی طراحی، یک پنجرهٔ بهینه برای ترکیب مکانیک–الکتریک دارد و بهینهسازی فقط با «بیشتر کردن نانوماده» حل نمیشود.
در نهایت، این E-Skin چاپ سهبعدی را میتوان یک نمونهٔ روشن از این ایده دانست که آیندهٔ تعامل انسان–ماشین به سمت «تماسِ قابل فهم» حرکت میکند؛ جایی که دستگاهها نهتنها شکل بدن را دنبال میکنند، بلکه با دقت بالا میفهمند بدن چه میکند، چه میخواهد و چه تغییری در وضعیت فیزیولوژیک رخ داده است. ویژگیهای برجستهٔ این پلتفرم دقیقاً همان چیزهایی است که آینده را میسازد: چندحسگری یکپارچه (کشش/فشار/دما)، چاپپذیری سهبعدی با رفتار shear-thinning، شبکهٔ سهپیوندی برای پایداری مکانیکی، رسانایی تنظیمپذیر با MoS₂ پر نقص و چسبندگی به بافت مرطوب با PDA. این مجموعه، E-Skin را از یک «فیلم حسگر» به یک «پوست مصنوعیِ کارا» نزدیک میکند؛ پوستی که میتواند در رباتها به لمس ایمنتر منجر شود، در پوشیدنیها پایش دقیقتری ارائه دهد و در رابطهای انسان–ماشین، تعامل را طبیعیتر و هوشمندتر کند.